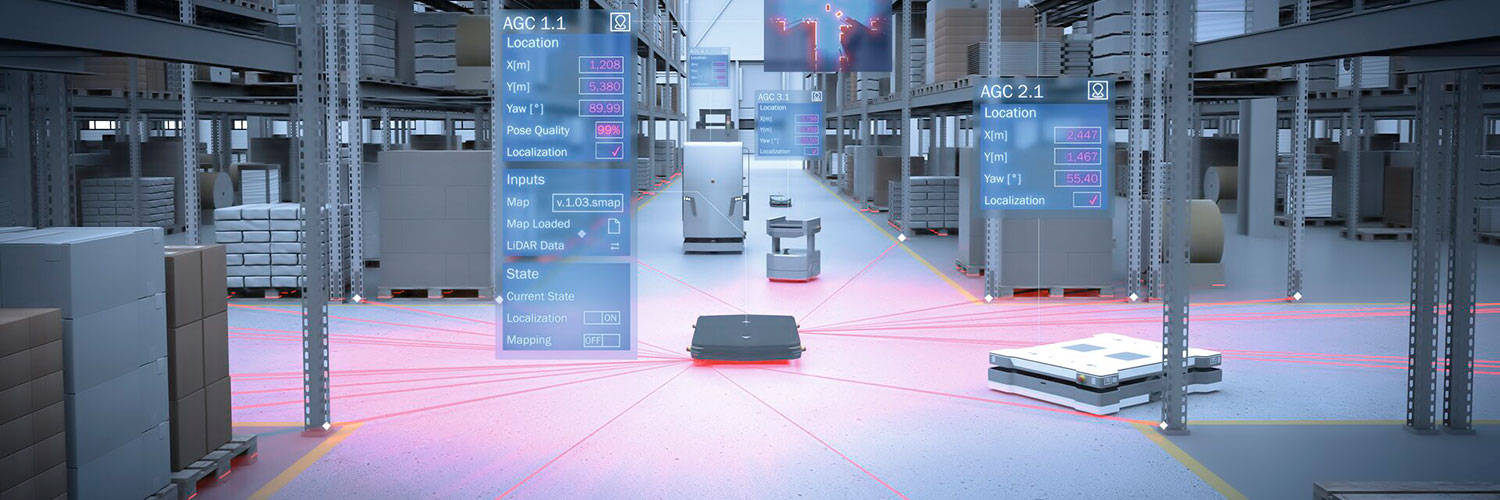
Keeping Automated Vehicles on Track with 2D LiDAR Localization
LiDAR Localization software uses measurement data from safety laser scanners as a supplement to magnetic and optical tracking guidance technologies.
Vehicle tracking and localization software within a manufacturing setting is essential in order to safely collaborate with robotic vehicles.
As a result, one challenge associated with the tracking of these autonomous vehicles is a loss of tracking guidance that leads to the potential for unplanned vehicle stops and fleet jams. But in the near future, this will be a thing of the past for automated industrial trucks in the area of intralogistics.
Using the LiDAR-LOC software from SICK, automated guided vehicles, carts, and robots can continue to remain on track even if the magnetic or optical-guide tape happens to be missing. The system uses the 2D measurement data of the surroundings acquired by SICK safety laser scanners, which are often already present onboard the vehicle as electro-sensitive protective devices.
The LiDAR-LOC hybrid stands for light detection and ranging localization on contour. This 2D localization solution continuously evaluates – separate from its safety function – the measurement data of the surroundings acquired by the safety laser scanners, thereby recognizing the position of the vehicle at all times.
It travels along on the vehicle as a supplementary system and activates itself automatically when the magnetic or optical guidance tape can no longer be detected.
The switching from tape guidance to the LiDAR-LOC hybrid software is unnoticeable to the observer as the vehicle continues to travel reliably along its route without any hesitation.
Mapping the surroundings
The necessary measurement data for localization and navigation are supplied by the safety laser scanners or, to be more specific, the high-resolution, digital process for reliable time and distance measurement. It calculates the precise distance and direction of all kinds of contours that were detected ahead of or around the vehicle.
The SICK Map Engineering Tool uses the measurement data to identify walls, gates, pillars or shelves for the LiDAR-LOC software and then map the vehicle’s operational environment. Given the large number of statistical orientation points that are acquired in the process, the vehicle localization functions reliably even in the event of temporary changes in the operating environment.
In addition, the track taught-in during a reference run of the vehicle is also mapped electronically. If the track on the ground is lost, the vehicle controller switches to the backup measuring localization system which accurately determines the vehicle position. When the tape is detected again, the track guidance system takes over the vehicle navigation as before.
Improving Performance and Flexibility
The LiDAR-LOC hybrid software is a supplementary system for automated guided vehicles (AGVs) and carts (AGCs) or autonomous mobile robots (AMRs). It can either be integrated by the manufacturer or easily retrofitted by the operator. Any subsequent changes or extensions to the track layouts can be quickly and simply incorporated into the electronic mapping.
The 2D LiDAR localization system helps avoid vehicle standstills or fleet jams during operation as a result of defective magnetic or optical track guidance tapes. This translates to higher availability and leads to increased throughputs and productivity in the distribution center.
Open for Custom Localization Solutions
Besides LiDAR-LOC hybrid, which combines magnetic or optical track guidance with free localization, the LiDAR-LOC software solution also supports navigation without track guidance, using only the measurement data from the LiDAR sensors based on the natural surrounding contours. This gives vehicle manufacturers and integrators the flexibility to choose how they would like to implement the vehicle localization functionality in each particular application.
Related: Precise Fine Positioning for Single and Double-Deep Racking 
Related White Paper
Autonomous Mobile Robots: The Essential Guide to Safety and Productivity
From production to delivery, automation is happening in all industries. Industry trends show that the use of autonomous mobile robots show no sign of slowing down. Download Now!
View more SICK Resources
Article Topics
SICK News & Resources
ProMat C-Suite Interview with Dave Szczepanski: The field of robotics comes to life Leaders Q&A: Deploying Intelligent Sensors to Improve Warehouse Operations SICK and Aeva partner to offer 4D LiDAR to industrial sensing applications MODEX C-Suite Q&A: Tasha Bury, CFO, SICK, Inc. Take the Next Step on Your Digital Transformation Journey SICK introduces sensor solutions for mobile and stationary robotic applications Sensor Solutions for Mobile and Stationary Robotic Applications More SICKLatest in Warehouse|DC
Spotlight Startup: Cart.com is Reimagining Logistics Walmart and Swisslog Expand Partnership with New Texas Facility Taking Stock of Today’s Robotics Market and What the Future Holds U.S. Manufacturing Gains Momentum After Another Strong Month Biden Gives Samsung $6.4 Billion For Texas Semiconductor Plants Walmart Unleashes Autonomous Lift Trucks at Four High-Tech DCs Plastic Pollution is a Problem Many Companies are Still Ignoring More Warehouse|DC