Drone Relays for Battery-Free Networks
In this paper, MIT researchers present RFly, a system that combines the agility of drones with the sensing capabilities of RF signals, enabling drones to detect and localize objects in non-line-of-settings and over a wide area.
Battery-free sensors, such as RFIDs, are annually attached to billions of items including pharmaceutical drugs, clothes, and manufacturing parts.
The fundamental challenge with battery-free sensors is that they are only reliable at short distances of tens of centimeters to few meters.
As a result, today’s systems for communicating with and localizing battery-free sensors are crippled by the limited range.
To overcome this challenge, this paper presents RFly, a system that leverages drones as relays for battery-free networks.
RFly delivers two key innovations.
It introduces the first full-duplex relay for battery-free networks.
The relay can seamlessly integrate with a deployed RFID infrastructure, and it preserves phase and timing characteristics of the forwarded packets.
RFly also develops the first RF-localization algorithm that can operate through a mobile relay.
We built a hardware prototype of RFly’s relay into a custom PCB circuit and mounted it on a Parrot Bebop drone.
Our experimental evaluation demonstrates that RFly enables communication with commercial RFIDs at over 50 m.
Moreover, its through-relay localization algorithm has a median accuracy of 19 centimeters.
These results demonstrate that RFly provides powerful primitives for communication and localization in battery-free networks.
RFly introduces a new relay technology, designed particularly for battery-free networks.
The relay can seamlessly integrate with an already deployed RFID infrastructure, as shown in Fig. 1. When a reader transmits a query, the relay picks
it up, forwards it to an RFID then forwards the RFID’s reply back to the reader. As the drone flies, it can scan an entire warehouse, seamlessly extending the range of an already deployed infrastructure and eliminating its blind spots.
RFly’s relay needs to satisfy three key properties:
- First, it must be bidirectionally full-duplex. In particular, backscatter communication is full-duplex in nature (RFIDs communicate by reflecting a reader’s signal). Hence, to enable backscatter communication, RFly’s relay must support four concurrent wireless transmissions as shown in Fig. 1.
- Second, the relay needs to preserve the phase and timing characteristics of the forwarded packets. This is necessary because accurate localization hinges on phase measurements.
- Finally, it must be compact to be mounted on a drone.
Now that we can capture the phase of the RFID’s response, we may proceed to localization. In particular, as the drone flies, the relay captures RFID responses at different points along its trajectory, emulating an antenna array as shown in Fig. 2(a).
However, relay-based localization exhibits a fundamental difference from all past work on antenna arrays. Since the reader obtains phase measurements through the relay, the measured phase does not consist of a single link (direction) as in typical antenna array scenarios. Rather, the phase is an entanglement of two half-links: one between the reader and the relay and another between the relay and the RFID tag, as shown in Fig. 2(b).
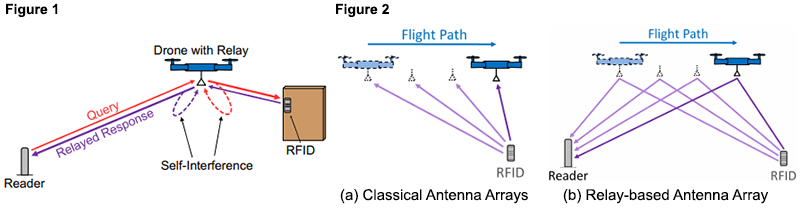
Figure 1: RFly overview and the self-interference challenge. The packets forwarded by the relay on the uplink and downlink feed back into its antenna, causing self-interference.
Figure 2: Challenge of phase entanglement. (a) In traditional antenna arrays, the phase measurements correspond to a direct link between the RF source and the antenna. (b) When the reader obtains the phase through the relay, the phase is an entanglement of two half-links: one between the relay and the drone and another between the relay and the RFID.
Credit: MIT Drone Relays for Battery-Free Networks; Y. Ma, N. Selby, F. Adib

What’s Related

Favorites